

What I should have done is look at the model more closely in 3D. The living area (with dotted hatching on carpet) is 3 steps lower than the rest of the house in the Revit sample file. The sofa is on the lower level, and only the back and arms protrude above the floor level of the rest of the house.

What Revit does in calculating the path is to calculate obstructions from the 'Bottom' height up to the 'Top' of the analysis zone, relative to the level of the plan view that you are in. Any obstructions outside this height range are ignored.

What happens in this example is that the path of travel is calculated ignoring the change in level going down the 3 steps. The bulk of the sofa is below the analysis zone, so the only thing the path will avoid is the sofa back, and the path happily runs across the sofa seat - even if you might have trouble doing so when running in a panic.
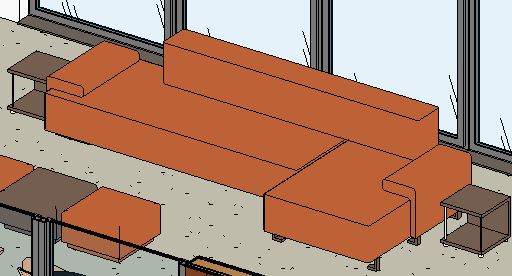
If you look closely, you can see a small kink in the path, steering clear of the sofa back.

If we select the sofa and raise its height so its fully within the analysis zone, .

When you update the path, then you may get the expected result with the escape path sneaking around the back of the sofa.


That space behind the sofa looks a bit narrow, so I wondered how Revit would respond if we make it even narrower - so I nudged the sofa a bit closer to the side wall, then updated the path again.

Now that is definitely a problem - no way could you sneak behind the sofa! It seems like Revit is allowing a clearance around the sofa, but not the wall behind it.
As per my previous (Dalek) post, if you leave the sofa down on the lower floor level, then lower the Bottom height of the analysis range to anything less than 175mm, it fails when you try to update the path or to create a new one that crosses the 3 steps down into the split level living area.
What this tells me is that this tool is very much a work in progress, and we should probably wait until it is updated before trying to use it in anger on a real project. It is interesting to note that the calculations evaluate the true 3D shape of any obstacles, rather than a bounding box - something that might catch you out in situations like this.
For more info & enhancemenets on this feature refer to:
Also, note that IBC commentary clearly says that Path of Travel cannot follow diagonals across rooms - one must assume worst case path at right angles around the sides of fixed objects. For code purposes, this tool is, unfortunately, fairly useless at this time.
ReplyDeleteAs Wes alluded, this tool is pretty useless.
ReplyDeleteIt would be fine if Revit took a fist pass and the let us modify it subsequently. Without the ability to modify the path and set it where it needs to be, there's no way to use it.
Honestly, the program just needs a simple little polyline / line string element of some sort that can report it's full length. It's needed that since forever.